Über mich
- 3D Computer Vision
- Autonomes Fahren
- Mobile Robotik
- Digitale Signalverarbeitung
News
[08/2024] Aymeric Fleith’s work LiFCal on light field camera online calibration has been accepted at GCPR 2024.
[03/2024] We are organizing the workshop ViLMa - Visual Localization and Mapping at CVPR in Seattle. The workshop will take place on June 17, 2024.
[03/2023] Linus Härenstam-Nielsen’s paper Semidefinite Relaxations for Robust Multiview Triangulation, co-authored by Daniel Cremers and myself, has been accepted at CVPR 2023.
[12/2022] I held my inaugural lecture at HKA. The lecture can be found here.
[10/2022] On October 23 our 3rd Workshop on Map-based localization for Autonomous Driving (MLAD) is taking place at ECCV2022 in Tel-Aviv.
NEWS ARCHIVForschung

Map-based Localization
Localization within a pre-build map based on camera images

Dense Monocular SLAM
Tracking and dense 3D mapping based on a monocular camera

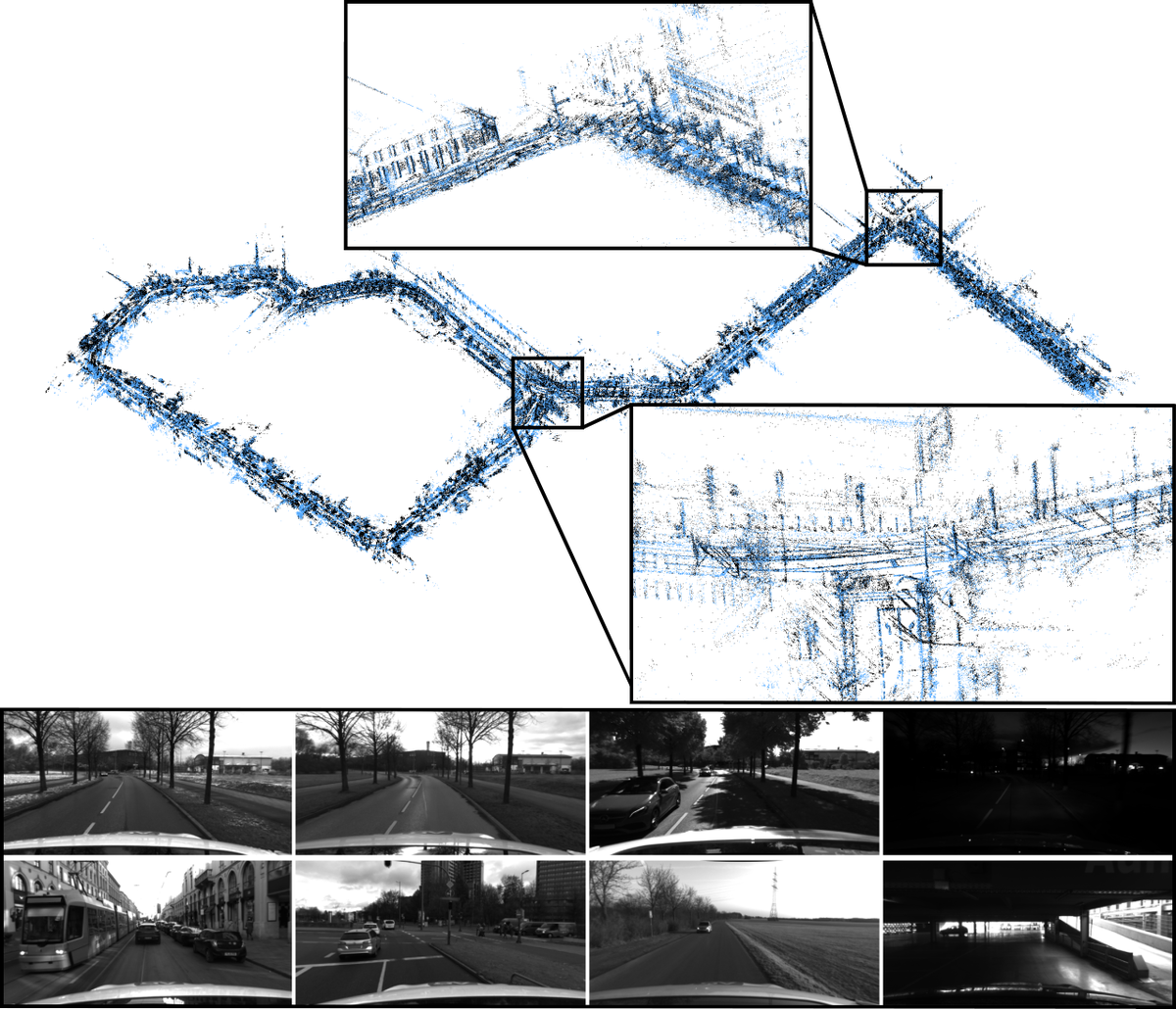
Large-scale Reconstruction
Camera based large-scale dense 3D reconstruction

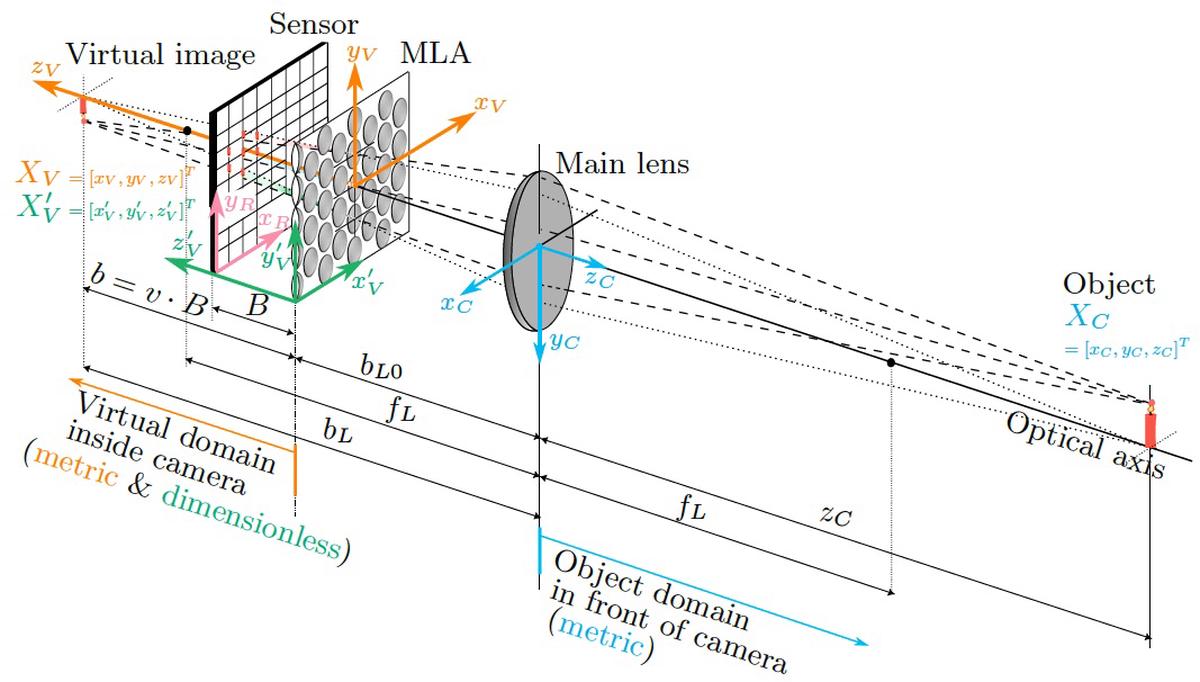
Light Field SLAM
Localization and 3D mapping using micro lens array based light field cameras













Werdegang
Kontakt
- niclas.zeller@h-ka.de
- Moltkestr. 30
76133 Karlsruhe - Gebäude M, Raum 205