Map-based Localization

Map-based localization (relocalization) focuses on the task of estimating the global position of a vehicle or robot within a pre-built map by using the vehicle's/robot's onboard sensors.
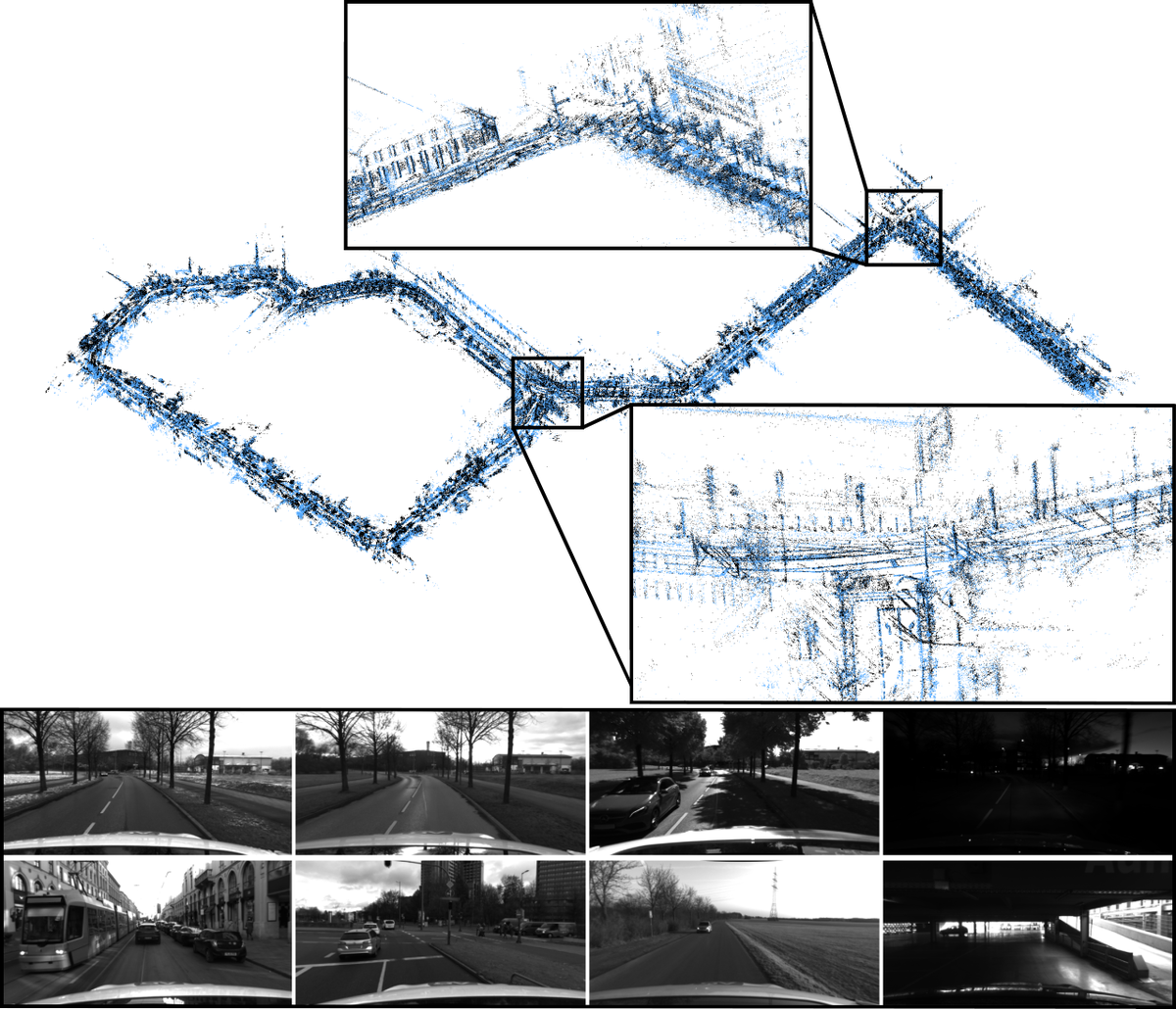
Especially for camera based relocalization a major challenge lies in the design of algorithms that are robust to appearance changes caused by weather, lighting and structural changes.
To enable robust map-based localization there is an increasing demand for multi-weather datasets suitable for the development and evaluation of state-of-the-art algorithms.